Lab 12
Dato: 2/12 2010Tilstedeværende: Lars Christian og Line (Daniel er syg)
Varighed: 5 timer
Mål: Vælge slut projekt, sørge for at alle dele til projektet er her og begynde planlægning af projektet, gå i gang med første fase.
Plan: Kontakte Daniel for at høre hans tanker om de forskellige projektidéer, få fat i manglende dele (bestille/få af Ole), finde ud af hvordan projektet skal planlægges, dele det i faser, starte på den første fase hvis der er tid.
1. Valg af projekt
Vi ringede til Daniel for at høre hans tanker om de 3 end-course projekter vi beskrev i den forrige blog. Han svarede desværre ikke, derfor bliver vi nødt til at beslutte et projekt uden ham. Vi har herefter en-stemmigt besluttet at lave vores idé nummer 1: pingpong/smørklat.
2. Bestilling af dele
Vi skal have bestilt 4 omnihjul til "smørklat" robotten og have fat i to NXT'er mere samt flere motorer.
Efter en snak med Ole omkring vores ide har vi ændret konceptet i vores spil. Ole kommer med flere NXT'er og motorer + sensorer.
Beskrivelse af det nye projekt.
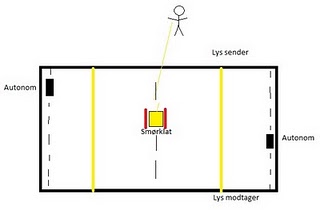
På billedet ovenfor ses grundideen i det "nye" spil. Her har vi to robotter (en i hver ende) der hver har ansvaret for at skyde til bolden når den er i deres ende (nedenfor ses beskrivelse af hvordan). I midten har vi smørklatten der har to bumpers monteret så bolden ryger tilbage hvis smørklatten rammes. På banen er der to lysstriber disse skal registrere hvorvidt bolden har været forbi dem.
Når den ene robot i enden skyder til bolden sender den et signal til computeren om at der er skudt, så begynder lyssensoren at lytte for at finde ud af hvor langt bolden kommer, kommer den kun forbi den ene lyssensor har smørklatten blokeret bolden og skal derfor have point. Der gives point ved at begge lyssensorer skal have set bolden inden for x tid efter der er blevet skudt, og hvis kun den ene har sendt signal til computeren om at den har set bolden inden for x tid, bliver der givet point. Det er computerens ansvar at holde styr på hvor mange point der er givet.
Ende-robotterne skal skyde til bolden ved hjælp af en slags arm der skal om bag bolden.
Vi prøver at simplicifere vores oprindelige ide og derfor vil vi gerne finde en måde at finde bolden på uden brug af kamera + software. For at gøre dette har vi tænkt os at montere en lyssensor på de to enderobotter så de kan genkende lysintesiteten fra bolden, i forhold til omgivelserne.
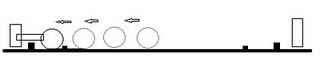
På banen skal der monteres en barriere som sørger for at bolden ikke flyver ud af banen, men samtidig også sørger for at bolden bliver liggende i enden så enderobotterne kan nå den. Vores ide er at bygge to barrierer (se skitse nedenfor), hvor den lille skal sørge for at bolden bliver i enden og den store for at bolden ikke flyver ud af enden.
3. Planlægning
Vi vil gerne dele projektet i flere dele så vi har en fornemmelse af hvor langt vi er og hvor meget vi mangler undervejs. Nedenfor ses den foreløbige plan for hver fase
1. Fase
- Test af lyssensor og lamper til lysstriberne (rækkevidde)
- Bygning af enderobotter
- Bygning af smørklat
2. Fase
- Bygning af bane (med bump og lys + sensorer)
- Programmering af enderobot
- Køre fra side til side
- Undgå bander
- Finde bolden og stoppe (via. lyssensor)
- Skyde til bolden
Efter 2. fase skulle vi gerne have to robotter der skyder bolde imellem hinanden.
3. Fase
- Programmering af lysstribe
- Sende signal til pc om afbrydelse
- Programmering af smørklat
- Køre fra side til side
- Fjernstyring, men kun fra side til side
- Koordinering med PC
- Point (lyssensor)
Vi skulle nu gerne have et færdigt spil smørklat
4. Fase (udvidelsesmuligheder)
- Smørklat på omnihjul der kan køre rundt, men stadig blokerer bolden.
- Smørklat med egen vilje - f.eks. bakker når du bliver for ivrig / kører for tæt på kanten.
- Styring af sigte med enderobotterne så de ikke bare skyder ligeud - men i en tilfældig retning.
- Spille med flere bolde.
4. I gang med 1.fase
1. Test af lyssensorer
Vi byggede fire af de små lamper sammen, og satte sølvcones på for at fokusere lysstrålen. Vi testede med et af de programmer vi tidligere har brugt for at måle hvad lysintensiteten var. Vi målte den til at være hhv. 48 og 54 med ca. 80 cm i mellem lampe og måler, hvilket er tilstrækkeligt til at bolden kan registreres.
2. Bygning af robot
Vi startede med at lave en prototype til en skydearm og besluttede os for at lave den lodrette model, fremfor den vandrette (se billedet nedenfor). Dette valgte vi fordi at vi gerne vil have muligheden for senere at spille med flere bolde, og i det tilfælde vil vi kun skyde til en bold af gangen, hvilket vi ikke er sikre på vi ville kunne kontrollere med den vandrette udgave af skydearmen.

Desuden besluttede vi at forsøge at bygge robotten så det var nemt at montere/afmontere NXT'en hvis dette skulle blive nødvendigt (så det var nemt at genstarte NXT'en efter en software error).

Konklusion
Vi har i dag valgt et projekt, overvejet hvordan projektet kan laves og forsimplet den originale ide. Vi er begyndt på startfaserne af projektet, testet lyssensorer og overvejet designet af vores robot. Vi er kommet frem til at vores robot skal bygges med en lodret slå arm og så NXT’en let kan afmonteres. Ud fra vores test af lyssensorer har vi konkluderet at vi kan registrere når bolden kommer forbi, og derfor kan bruge dem som forventet.
Vi skal nu til at bygge robotter og bane, hvorefter vi skal til at programmere.
Ingen kommentarer:
Send en kommentar