Lab 11
Dato: 25/11 2010Tilstedeværende: Lars Christian og Line
Varighed: 3 timer
Mål: At finde slut projekt
Plan: Brainstorme projekt ideer, vælge de 3 bedste ud, beskrive dem og ud fra disse vælge den bedste ide.
1. Brainstorm
Ideer:
- Legway - Balance robot.
- Ping-pong
- BattleBots - Robotter der forsøger at skyde hinanden med lasere.
- Smørklat - To robotter skyder bolde imellem hinanden imens en tredje imellem dem skal forsøge at fange dem.
- Ræs, fjernstyret bil der skal køre hurtigt gennem en forhindrings bane
Teknik vi gerne vil bruge, der har været inspiration til vores brainstorm:
- Omnihjul (f.eks. http://www.holonomicwheel.com)
- Armkontrol/Wiimote
- Camera-tracking
2. Afvisning af ideer
Vi afviste hurtigt ideen med battleBots fordi den er for teknisk besværlig, da det kræver at vi kan skyde og opfange laserskud. Hvilket vi ikke kan se nogen umiddelbar løsning på. Desuden fandt vi ikke ideen specielt interessant i forhold til de andre ideer.
3. Vores 3 bedste ideer
Vores tre favorit ideer er blandet af de resterende emner i vores brainstorm.
1. Ping-pong / Smørklat
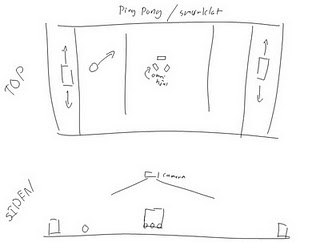
Vores ide til ping-pong udsprang fra et ønske om at bruge camera-tracking. Derudover ville vi gerne bruge omnihjul, disse kunne bruges til at programmere en robot bold da omnihjul giver os mulighed for “skæve” bevægelser uden at skulle rotere robotten (eksempel: http://www.youtube.com/watch?v=qiqqbrLEfo4).
Udfra denne ide fandt vi på smørklat, hvor en robot i midten på omnihjul forsøger at fange bolden som de andre spillere skyder imellem hinanden.
Hvad er svært i dette projekt:
- At få lavet slåarme til robotterne så de kan skubbe/slå til bolden.
- At få lavet fangearme så vi kan registrere vi har fanget bolden.
Hvad vil vi gerne fremlægge:
Et spil smørklat hvor man styrer robotten i midten og skal forsøge at fange bolden. Styringen kunne foregå via. Wiimote eller fjernstyret fra mobilen eller pc.
Til projektet skal vi bruge følgende:
- Bane med bander
- Omnihjul
- 3 NXT'er
- 6 motorer +-
- Tryksenorer
- Camera-tracking software
2. Armkontrol/ræs
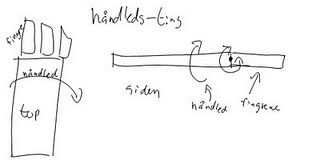
Vi har tidligere forsøgt at konstruere noget ud af Lego som kunne sidde på armen og opfange hånden og fingrenes bevægelse og give os mulighed for at styre en robot derigennem.
Ud fra denne “håndleds-kontroller” syntes vi det kunne være sjovt at programmere en bil-robot hvor retningen styres ud fra armen/håndledets bevægelse og speeder, bremse, kobling og gear styres med fingrene.
Med dette vil vi enten lave en bil der kører ræs (f.eks. på tid, eller mod en anden robot) rundt om forhindringer.
En anden ide kunne være en bilsimulator som simulerer en køreprøve (parallelparkere, bakke om hjørne). Derudover kunne bilen også have sit eget liv, i form af at den f.eks. overtager kontrollen når det bliver farligt.
Hvad er svært?
- Bygge håndleds-kontroller, og få denne til at fungere
Hvad vil vi fremlægge:
Enten en slags bilsimulator, eller en bil der kan køre ræs, men med sin egen mening om tingene (f.eks. nægter at køre stærkt når man er for tæt på muren)
Til projektet skal vi bruge:
- 2 eller 3 NXT'er
- Gyroskop
- 4-6 motorer +-
- evt. bane
3. Legway

Vi er i gruppen meget facinerede af legwayen og synes det kunne være sjovt at lave den. Desværre har vi svært ved at finde på noget der ikke blev udviklet til den sidste år, og vi synes ikke vi ville lave et lignende projekt. Dog kunne vi måske finden en anden måde at implementere balance-mekanismen.
Hvad er svært?
- At balancere robotten, dvs. mange realtime beregninger og kontrol af motorer.
Vi vil gerne fremlægge:
En robot der kan balancere på to hjul, evt. med mere funktionalitet, f.eks. wall-following.
Til projektet skal vi bruge:
- 1 NXT
- Gyroskop
- 2 motorer
- evt. flere sensorer
4. Til sidst legede vi lidt med fjernstyring af robot med mobiltelefonen.
Koden til Android mobiltelefonen kan ses her
Og koden til NXT’en her
Ingen kommentarer:
Send en kommentar